
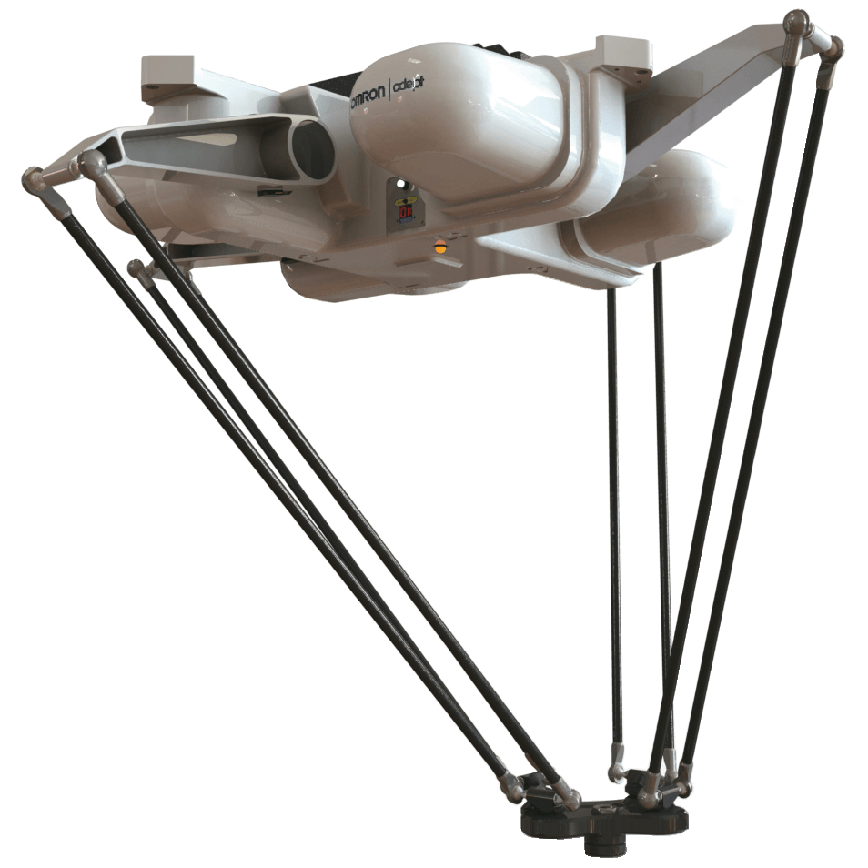
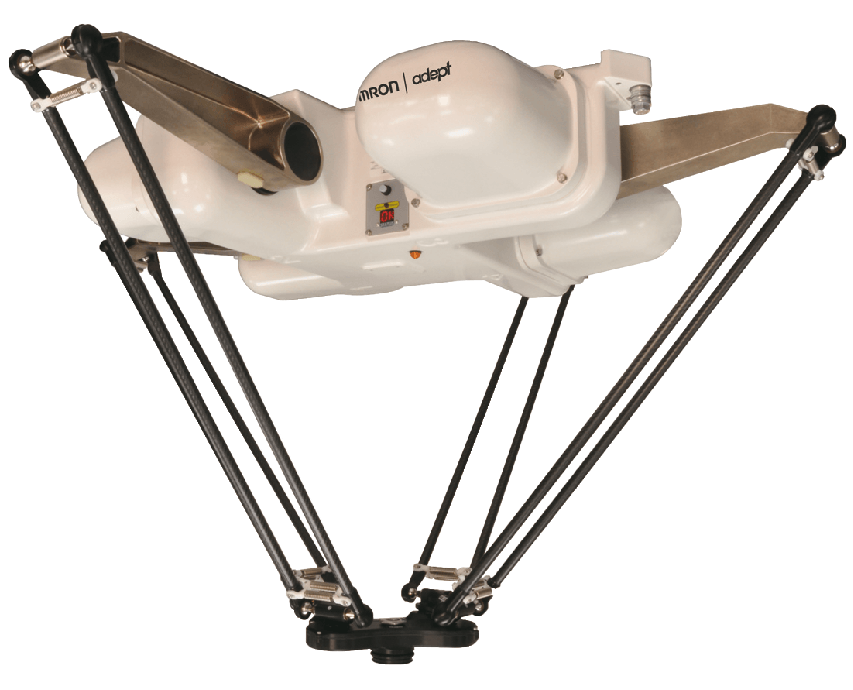
Quattro
Un robot parallelo a quattro assi raggiunge una velocità e una precisione estremamente elevate
- Funzionalità Ethernet per il controllo del robot attraverso il familiare linguaggio di programmazione (IEC 61131-3) del machine controller NX/NJ
- La presenza di quattro braccia garantisce una distribuzione dei carichi sempre uniforme
- Convogliamento e montaggio veloci e ad alta precisione
- Progettato con un elevato carico utile per il supporto multi-mano (prelievo multiplo)
- Il modello 650HS è approvato dal Ministero dell'Agricoltura degli Stati Uniti (USDA) per il trattamento primario degli alimenti
- Modelli con area di lavoro di 1.300 e 1.600 mm
- Fino a 15 kg di portata massima
- Grado di protezione IP65 (IP66 per il modello HS)
Caratteristiche ed info per ordinare
| Prodotto | Payload | Reach | Robot controller | Z-Stroke | Degree of protection (IP) | Rotation -/+ | Platform type | Descrizione | |
|---|---|---|---|---|---|---|---|---|---|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Robot Quattro ePLC650H P30 (aggiuntivo), rotazione 0º, portata 15 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP20, strumentazione IP67 |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Robot Quattro ePLC650H P31 (aggiuntivo), rotazione 46,25º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP20, strumentazione IP67 |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Quattro 650H, aggiuntivo, carico utile 6 kg, raggio di azione 1300 mm di diametro, P32, rotazione 92,5º, 4 assi, asse Z 500 mm, base IP20, strumentazione IP67, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Robot Quattro ePLC650H P34 (aggiuntivo), rotazione 185º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP20, strumentazione IP67 |
|
|
|
8 kg | 650 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Robot Quattro ePLC650HS P30 (aggiuntivo), rotazione 0º, portata 15 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP66, strumentazione IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Robot Quattro ePLC650HS P31 (aggiuntivo), rotazione 46,25º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP66, strumentazione IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Robot Quattro ePLC650HS P32 (aggiuntivo), rotazione 92,5º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP66, strumentazione IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Robot Quattro ePLC650HS P34 (aggiuntivo), rotazione 185º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP66, strumentazione IP67, USDA |
|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Quattro 650H, IP65, P30, aggiuntivo |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Quattro 650H, IP65, P31, aggiuntivo |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Quattro 650H, IP65, P32, aggiuntivo |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Quattro 650H, IP65, P34, aggiuntivo |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Robot Quattro ePLC800H P30 (aggiuntivo), rotazione 0º, portata 10 kg, raggio di azione 1600 mm diam, asse Z 500 mm, base IP65, strumentazione IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Robot Quattro ePLC800H P31 (aggiuntivo), rotazione 46,25º, portata 4 kg, raggio di azione 1600 mm diam, asse Z 500 mm, base IP65, strumentazione IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Robot Quattro ePLC800H P32 (aggiuntivo), rotazione 92,5º, portata 4 kg, raggio di azione 1600 mm diam, asse Z 500 mm, base IP65, strumentazione IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Robot Quattro ePLC800H P34 (aggiuntivo), rotazione 185º, portata 4 kg, raggio di azione 1600 mm diam, asse Z 500 mm, base IP65, strumentazione IP67 |
|
|
|
7 kg | 800 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Quattro 800HS, USDA, P30, aggiuntivo |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Quattro 800HS, USDA, P31, aggiuntivo |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Quattro 800HS, USDA, P32, aggiuntivo |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Quattro 800HS, USDA, P34, aggiuntivo |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Quattro 800H, IP65, P30, aggiuntivo |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Quattro 800H, IP65, P31, aggiuntivo |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Quattro 800H, IP65, P32, aggiuntivo |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Quattro 800H, IP65, P34, aggiuntivo |
|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Robot Quattro ePLC650H P30, rotazione 0º, portata 15 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP20, strumentazione IP67 |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Robot Quattro ePLC650H P31, rotazione 46,25º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP20, strumentazione IP67 |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Quattro 650H, carico utile 6 kg, raggio di azione 1300 mm di diametro, P32, rotazione 92.5º, 4 assi, asse Z 500 mm, base IP20, strumentazione IP67, ePLC |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Robot Quattro ePLC650H P34, rotazione 185º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP20, strumentazione IP67 |
|
|
|
8 kg | 650 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Robot Quattro ePLC650HS P30, rotazione 0º, portata 15 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP66, strumentazione IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Robot Quattro ePLC650HS P31, rotazione 46,25º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP66, strumentazione IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Robot Quattro ePLC650HS P32, rotazione 92,5º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP66, strumentazione IP67, USDA |
|
|
|
3 kg | 650 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Robot Quattro ePLC650HS P34, rotazione 185º, portata 6 kg, raggio di azione 1300 mm diam, asse Z 500 mm, base IP66, strumentazione IP67, USDA |
|
|
|
15 kg | 650 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Quattro 650H, IP65, P30, ePLC, SmartController EX |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Quattro 650H, IP65, P31, ePLC, SmartController EX |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Quattro 650H, IP65, P32, ePLC, SmartController EX |
|
|
|
6 kg | 650 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Quattro 650H, IP65, P34, ePLC, SmartController EX |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP20 | 0 ° | P30 | Robot Quattro ePLC800H P30, rotazione 0º, portata 10 kg, raggio di azione 1600 mm diam, asse Z 500 mm, base IP65, strumentazione IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 46.25 ° | P31 | Robot Quattro ePLC800H P31, rotazione 46,25º, portata 4 kg, raggio di azione 1600 mm diam, asse Z 500 mm, base IP65, strumentazione IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 92.5 ° | P32 | Robot Quattro ePLC800H P32, rotazione 92,5º, portata 4 kg, raggio di azione 1600 mm diam, asse Z 500 mm, base IP65, strumentazione IP67 |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP20 | 185 ° | P34 | Robot Quattro ePLC800H P34, rotazione 185º, portata 4 kg, raggio di azione 1600 mm diam, asse Z 500 mm, base IP65, strumentazione IP67 |
|
|
|
7 kg | 800 mm | EX Controller | 500 mm | IP67 | 0 ° | P30 | Quattro 800HS, USDA, P30, ePLC, SmartController EX |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 46.25 ° | P31 | Quattro 800HS, USDA, P31, ePLC, SmartController EX |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 92.5 ° | P32 | Quattro 800HS, USDA, P32, ePLC, SmartController EX |
|
|
|
1 kg | 800 mm | EX Controller | 500 mm | IP67 | 185 ° | P34 | Quattro 800HS, USDA, P34, ePLC, SmartController EX |
|
|
|
10 kg | 800 mm | EX Controller | 500 mm | IP65 | 0 ° | P30 | Quattro 800H, IP65, P30, ePLC, SmartController EX |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP65 | 46.25 ° | P31 | Quattro 800H, IP65, P31, ePLC, SmartController EX |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP65 | 92.5 ° | P32 | Quattro 800H, IP65, P32, ePLC, SmartController EX |
|
|
|
4 kg | 800 mm | EX Controller | 500 mm | IP65 | 185 ° | P34 | Quattro 800H, IP65, P34, ePLC, SmartController EX |
|
Accessori
Ordering information
| Apperance | Type | Name/Specifications | Order code |
|---|---|---|---|
 |
Robot Integrated Controller | 16 motion axis, up to 8 robots control | NJ501-R300 |
| 32 motion axis, up to 8 robots control | NJ501-R400 | ||
| 64 motion axis, up to 8 robots control | NJ501-R500 | ||
 |
Robot Controller | SmartController EX | 19200-000 |
| SmartController EX + Front Panel | 19300-000 | ||
 |
Pendant | T20 Pendant with 10 m Cable | 10046-010 |
| T20 Pendant-Jumper Plug | 10048-000 | ||
| T20 Pendant Wall Bracket | 10079-000 | ||
| T20 Adapter Cable, 3 m | 10051-003 | ||
 |
Vision Controller | IPC Application Controller | AC1-152000 |
 |
Camera | GigE PoE, 1602 x 1202 pixels, 60 fps, Monochrome, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-250 |
| GigE PoE, 1602 x 1202 pixels, 60 fps, Color, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-251 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Monochrome, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-300 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Color, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-301 | ||
| Belt Encoder (Conveyor-Tracking) |
Encoder Kit IP65 | 09742-001 | |
| Y-Adapter Cable, 3 m | 09443-000 | ||
| Encoder Extension Cable, 5 m | 09446-050 | ||
| SCEX-BELT,Y-Adapter Cable, 0.5 m | 09550-000 | ||
| XBELTIO Cable, 0.6 m | 13463-000 | ||
| Additional I/O Options | IO Blox (connect to robot), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30200 | |
| IO Block (connect to previous IO Blox), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30100 | ||
| IO Blox-to-robot Cable, 3 m | 04677-030 | ||
| IO Blox-to-IO Blox Cable, 3 m | 04679-030 | ||
| IO Blox-to-IO Blox Cable, 0.3 m | 04679-003 | ||
| XIO Termination Block, 12 inputs/8 outputs, cables included (1.8 m) | 90356-40100 | ||
| XDIO Termination Block, 50 pin, cables included (2 m) | 09747-000 | ||
 |
Front Panel | Front Panel with 3 m cable | 90356-10358 |
| Front Panel Cable, 3 m | 10356-10500 | ||
| Power Supply/Cable | AC Power Cable, 5 m | 04118-000 | |
| 24 VDC Power Cable, 5 m | 04120-000 | ||
| 24 VDC, 6.5 A, 150 W (Front Mounting), Power Supply | S8FS-G15024C
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 24 VDC, 6.5 A, 150 W (DIN-Rail Mounting), Power Supply | S8FS-G15024CD
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 1394 Cable, 4.5 m | 13632-045 | ||
| eAIB XSYSTEM Cable Assembly, 1.8 m | 13323-000 | ||
| DB9 Splitter, 0.3 m | 00411-000 | ||
| eAIB XSYS Cable, 4.5 m | 11585-000 | ||
| Ethernet Cable | XS6W-6LSZH8SS
2
Refer
to the Industrial Ethernet Cables Catalog (Cat.No.G019) for details. |
||
| Industrial Switching Hubs | W4S1-05C
2
Refer
to the Industrial Switching Hubs Catalog (Cat.No.V227) for details. |
||
| Solenoid Valve Kit | eCobra robots (600, 800, 800 Inverted) | 02853-000 | |
| Cable Seal Kit | Hornet 565 IP65/67, Quattro 650HS IP65/67, Quattro 800HS IP65/67 | 08765-000 | |
| Quattro 650HS Standard, Quattro 800HS Standard | 09564-000 | ||
| eCobra 800 IP65/67 | 04813-000 | ||
| eCobra 800 Inverted IP65 | 09073-000 | ||
 |
ACE License | Automation Control Environment (for ACE 4.x) | Please download it from following URL: http://www.adept.com/Robots-Tool |
| ACE PackXpert (for ACE 4.x) | 20409-000 | ||
| ACE Sight Vision Software (for ACE 4.x) | 20410-000 | ||
| ACE PackXpert with ACE Sight Vision (for ACE 4.x) This license contains an ACE PackXpert license and an ACE Sight license. |
20433-000 | ||
 |
Related Products | Machine Automation Controller NX/NY/NJ Series | NX/NY/NJ
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
| Automation Software Sysmac Studio | SYSMAC-SE2
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
||
| Collection of software functional componentsSysmac LibraryAdept Robot Control Library | SYSMAC-XR009
2
Refer
to the Sysmac Library Catalog (Cat.No.P106) for details. |
||
| Sysmac Studio 3D Simulation option | SYSMAC-SA4 |
||
Contact your Omron representative for lenses, lights, and licenses.
Sysmac Library
![]()
The Sysmac Library is a collection of software functional components that can be used in programs
for the NX/NY/NJ Machine Automation Controllers.Please download it from following URL and install to Sysmac Studio Automation Software.http://www.ia.omron.com/sysmac_library/The Adept Robot Control Library allows you to control Delta, Articulated and SCARA robots manufactured
by Omron Adept Technologies Inc. from the NX/NY/NJ Machine Automation Controller by using the same
instructions and programming methods.
Come possiamo aiutarti?
Se hai domande o desideri richiedere un preventivo, contattaci o inviaci una richiesta.
Contattaci Quattro
ATTENZIONE! Non utilizzare questo modulo di contatto per i prodotti medicali Omron, per i quali vi invitiamo a consultare il sito Corman alla sezione Assistenza Tecnica.

Grazie per averci sottoposto la tua richiesta. Ti risponderemo non appena possibile.
Purtroppo abbiamo problemi tecnici. Il tuo modulo non è stato ricevuto correttamente. Ci scusiamo per l'inconveniete e ti chiediamo per favore di riprovare più tardi.
DownloadPreventivo per Quattro
Tramite questo modulo può richiedere un'offerta relativa al prodotto prescelto. Completi, per favore, i campi contrassegnati con *. I suoi dati personali verranno trattati secondo le normative vigenti. Le ricordo che il minimo importo fatturabile è di 400 € a cui bisogna aggiungere 25 € di spese amministrative.
Grazie per averci richiesto un'offerta. Vi risponderemo non appena possibile.
Purtroppo abbiamo problemi tecnici. Il tuo modulo non è stato ricevuto correttamente. Ci scusiamo per l'inconveniete e ti chiediamo per favore di riprovare più tardi.
DownloadSerie Robot Delta
Quattro 800H
- Area di lavoro nominale: Ø 1.600 x 215 mm (max. 500 mm)
- Portata massima: 4 ... 10 kg
- Numero di assi: 4
- IP65 (con kit sigilla-cavi opzionale)
Quattro 650H/HS
- Area di lavoro nominale: Ø 1.300 x 215 mm (max. 500 mm)
- Portata massima: 3 ... 15 kg
- Numero di assi: 4
- IP65 (con kit sigilla-cavi opzionale), modello IP66 HS
- Quattro 650HS è approvato dal Ministero dell'Agricoltura degli Stati Uniti (USDA) per il trattamento primario degli alimenti
Unità di controllo
Video

-

Omron's Adept Quattro delta robot demo with Aspirin packets
Omron Adept Quattro robot is the only delta robot in the world with patented features and USDA-accepted for meat and poultry processing. High-speed applications in packaging, manufacturing, assembly - Adept Quattro is a high performance industrial robot with a parallel structure, mainly used in high speed applications. More Information: *** Omron in United States *** Omron in Canada *** Omron in Mexico and Latin America
00:52
Omron's Adept Quattro delta robot demo with Aspirin packets
Omron Adept Quattro robot is the only delta robot in the world with patented features and USDA-accepted for meat and poultry processing. High-speed applications in packaging, manufacturing, assembly - Adept Quattro is a high performance industrial robot with a parallel structure, mainly used in high speed applications. More Information: *** Omron in United States *** Omron in Canada *** Omron in Mexico and Latin America
-

Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.
01:21
Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.Prodotti
-

I robot paralleli sono l'ideale per essere utilizzati nei settori alimentari, farmaceutici e sanitario
-

I robot paralleli sono ideali per essere utilizzati nei settori Food & Beverage, farmaceutico e sanitario
-

Un robot parallelo a quattro assi raggiunge una velocità e una precisione estremamente elevate
Area di download









_users_manual_en.jpg)







_getting_started_guide_en.jpg)






