
i4L
Nuovo robot i4L per lavorazioni di precisione, assemblaggio e movimentazione materiali
L'i4L è un robot SCARA compatto che offre prestazioni elevate con un costo ridotto.
Il robot i4L riesce a muoversi ad alta velocità e precisione con carichi fino a 5 kg. Il design compatto e la programmazione flessibile lo rendono ideale per un'ampia gamma di applicazioni robotiche, incluso l'assemblaggio di componenti elettronici.
Specifiche principali
- Capacità di carico di 5 kg
- Raggio d'azione di 350 mm, 450 mm e 550 mm con opzioni di montaggio su tavolo e a parete
- Controllore robotico integrato NJ-R con connettività EtherCAT
- Modelli Ethernet stand-alone
- Tempi di ciclo rapidi con una gamma di movimento e una ripetibilità senza precedenti
- Servomotori integrati estremamente potenti per gestire i carichi con facilità
- Design industriale avanzato e robusto
- Costo totale di proprietà ridotto
- Ottimizza la linea massimizzando i tempi di produttivi, tramite allarmi di manutenzione interattivi e un LED di stato RGB
Caratteristiche ed info per ordinare
| Prodotto | Payload | Reach | Z-Stroke | Robot controller | Degree of protection (IP) | Suitable for wall mounting | Suitable for ceiling mounting | EtherCAT communication | PROFINET communication | TCP/IP communication | RS232 communication | Vision | Suitable for pedestal/floor mounting | Conveyor tracking | PackXpert | Number of I/O-Blox | Descrizione | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
5 kg | 350 mm | 180 mm | Not required | IP20 | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes | Yes | 4 | Robot SCARA i4-350L, Ethernet stand-alone, payload 5kg, sbraccio 350mm, corsa Z 180mm, IP20, montaggio su tavolo |
|
|
|
5 kg | 350 mm | 180 mm | Not required | IP20 | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes | Yes | 4 | Robot SCARA i4-350L, Ethernet stand-alone, payload 5kg, sbraccio 350mm, corsa Z 180mm, IP20, montaggio a parete |
|
|
|
5 kg | 450 mm | 180 mm | Not required | IP20 | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes | Yes | 4 | Robot SCARA i4-450L, Ethernet stand-alone, payload 5kg, sbraccio 450mm, corsa Z 180mm, IP20, montaggio su tavolo |
|
|
|
5 kg | 450 mm | 180 mm | Not required | IP20 | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-450L, carico utile di 5 kg, sbraccio di 450 mm, 4 assi, 180 mm Zaxis, pannello inferiore, IP20, iCS-ENET |
|
|
|
5 kg | 550 mm | 180 mm | Not required | IP20 | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes | Yes | 4 | Robot SCARA i4-550L, Ethernet stand-alone, payload 5kg, sbraccio 550mm, corsa Z 180mm, IP20, montaggio su tavolo |
|
|
|
5 kg | 550 mm | 350 mm | Not required | IP20 | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes | Yes | 4 | Robot SCARA i4-550L, Ethernet stand-alone, payload 5kg, sbraccio 550mm, corsa Z 350mm, IP20, montaggio su tavolo |
|
|
|
5 kg | 550 mm | 180 mm | Not required | IP20 | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-550L, carico utile 5 kg, portata 550 mm, 4 assi, asse Z 180 mm, pannello inferiore, IP20, iCS-ENET |
|
|
|
5 kg | 550 mm | 350 mm | Not required | IP20 | Yes | No | No | Yes | Yes | No | Yes | Yes | Yes | Yes | 4 | Robot SCARA i4-550L, Ethernet stand-alone, payload 5kg, sbraccio 550mm, corsa Z 350mm, IP20, montaggio a parete |
|
|
|
5 kg | 350 mm | 180 mm | Robotics Integrated Controller | IP20 | Yes | No | Yes | No | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-350L, carico utile 5 kg, portata 350 mm, 4 assi, Zaxis 180 mm, pannello posteriore, IP20, iCS-ECAT |
|
|
|
5 kg | 350 mm | 180 mm | Robotics Integrated Controller | IP20 | Yes | No | Yes | No | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-350L, carico utile 5 kg, portata 350 mm, 4 assi, Zaxis 180 mm, pannello inferiore, IP20, iCS-ECAT |
|
|
|
5 kg | 450 mm | 180 mm | Robotics Integrated Controller | IP20 | Yes | No | Yes | No | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-450L, carico utile 5 kg, portata 450 mm, 4 assi, Zaxis 180 mm, pannello posteriore, IP20, iCS-ECAT |
|
|
|
5 kg | 450 mm | 180 mm | Robotics Integrated Controller | IP20 | Yes | No | Yes | No | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-450L, carico utile 5 kg, portata 450 mm, 4 assi, Zaxis 180 mm, pannello inferiore, IP20, iCS-ECAT |
|
|
|
5 kg | 550 mm | 180 mm | Robotics Integrated Controller | IP20 | Yes | No | Yes | No | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-550L, carico utile 5 kg, portata 550 mm, 4 assi, Zaxis 180 mm, pannello posteriore, IP20, iCS-ECAT |
|
|
|
5 kg | 550 mm | 350 mm | Robotics Integrated Controller | IP20 | Yes | No | Yes | No | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-550L, carico utile 5 kg, portata 550 mm, 4 assi, Zaxis 350 mm, pannello posteriore, IP20, iCS-ECAT |
|
|
|
5 kg | 550 mm | 180 mm | Robotics Integrated Controller | IP20 | Yes | No | Yes | No | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-550L, carico utile 5 kg, portata 550 mm, 4 assi, Zaxis 180 mm, pannello inferiore, IP20, iCS-ECAT |
|
|
|
5 kg | 550 mm | 350 mm | Robotics Integrated Controller | IP20 | Yes | No | Yes | No | Yes | No | Yes | Yes | Yes | Yes | 4 | i4-550L, carico utile 5 kg, portata 550 mm, 4 assi, Zaxis 350 mm, pannello inferiore, IP20, iCS-ECAT |
|
Accessori
Ordering information
| Apperance | Type | Name/Specifications | Order code |
|---|---|---|---|
 |
Pendant | T20 Pendant with 10 m Cable | 10046-010 |
| T20 Pendant-Jumper Plug | 10048-000 | ||
| T20 Pendant Wall Bracket | 10079-000 | ||
| T20 Adapter Cable, 3 m | 10051-003 | ||
 |
Vision Controller | IPC Application Controller | AC1-152000 |
 |
Camera | GigE PoE, 1602 x 1202 pixels, 60 fps, Monochrome, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-250 |
| GigE PoE, 1602 x 1202 pixels, 60 fps, Color, CMOS (1/1.8-inch equivalent), camera cables included (10 m) | 24114-251 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Monochrome, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-300 | ||
| GigE PoE, 2048 x 2048 pixels, 25 fps, Color, CMOS (1-inch equivalent), camera cables included (10 m) | 24114-301 | ||
| Belt Encoder (Conveyor-Tracking) |
Encoder Kit IP65 | 09742-001 | |
| Y-Adapter Cable, 3 m | 09443-000 | ||
| Encoder Extension Cable, 5 m | 09446-050 | ||
| SCEX-BELT,Y-Adapter Cable, 0.5 m | 09550-000 | ||
| XBELTIO Cable, 0.6 m | 13463-000 | ||
| Additional I/O Options | IO Blox (connect to robot), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30200 | |
| IO Block (connect to previous IO Blox), 8 inputs/8 outputs, cables included (0.3 m) | 90356-30100 | ||
| IO Blox-to-robot Cable, 3 m | 04677-030 | ||
| IO Blox-to-IO Blox Cable, 3 m | 04679-030 | ||
| IO Blox-to-IO Blox Cable, 0.3 m | 04679-003 | ||
| XIO Termination Block, 12 inputs/8 outputs, cables included (1.8 m) | 90356-40100 | ||
| XDIO Termination Block, 50 pin, cables included (2 m) | 09747-000 | ||
 |
Front Panel | Front Panel with 3 m cable | 90356-10358 |
| Front Panel Cable, 3 m | 10356-10500 | ||
| Power Supply/Cable | AC Power Cable, 5 m | 04118-000 | |
| 24 VDC Power Cable, 5 m | 04120-000 | ||
| 24 VDC, 6.5 A, 150 W (Front Mounting), Power Supply | S8FS-G15024C
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 24 VDC, 6.5 A, 150 W (DIN-Rail Mounting), Power Supply | S8FS-G15024CD
2
Refer to the Switch Mode Power Supply Datasheet
(Cat.No.T207) for details. |
||
| 1394 Cable, 4.5 m | 13632-045 | ||
| eAIB XSYSTEM Cable Assembly, 1.8 m | 13323-000 | ||
| DB9 Splitter, 0.3 m | 00411-000 | ||
| eAIB XSYS Cable, 4.5 m | 11585-000 | ||
| Ethernet Cable | XS6W-6LSZH8SS
2
Refer
to the Industrial Ethernet Cables Catalog (Cat.No.G019) for details. |
||
| Industrial Switching Hubs | W4S1-05C
2
Refer
to the Industrial Switching Hubs Catalog (Cat.No.V227) for details. |
||
| Solenoid Valve Kit | eCobra robots (600, 800, 800 Inverted) | 02853-000 | |
| Cable Seal Kit | Hornet 565 IP65/67, Quattro 650HS IP65/67, Quattro 800HS IP65/67 | 08765-000 | |
| Quattro 650HS Standard, Quattro 800HS Standard | 09564-000 | ||
| eCobra 800 IP65/67 | 04813-000 | ||
| eCobra 800 Inverted IP65 | 09073-000 | ||
 |
ACE License | Automation Control Environment (for ACE 4.x) | Please download it from following URL: http://www.adept.com/Robots-Tool |
| ACE PackXpert (for ACE 4.x) | 20409-000 | ||
| ACE Sight Vision Software (for ACE 4.x) | 20410-000 | ||
| ACE PackXpert with ACE Sight Vision (for ACE 4.x) This license contains an ACE PackXpert license and an ACE Sight license. |
20433-000 | ||
 |
Related Products | Machine Automation Controller NX/NY/NJ Series | NX/NY/NJ
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
| Automation Software Sysmac Studio | SYSMAC-SE2
2
Refer to the Sysmac Catalog (Cat.No.P072)
for details. |
||
| Collection of software functional componentsSysmac LibraryAdept Robot Control Library | SYSMAC-XR009
2
Refer
to the Sysmac Library Catalog (Cat.No.P106) for details. |
||
Contact your Omron representative for lenses, lights, and licenses.
Sysmac Library
![]()
The Sysmac Library is a collection of software functional components that can be used in programs
for the NX/NY/NJ Machine Automation Controllers.Please download it from following URL and install to Sysmac Studio Automation Software.http://www.ia.omron.com/sysmac_library/The Adept Robot Control Library allows you to control Delta, Articulated and SCARA robots manufactured
by Omron Adept Technologies Inc. from the NX/NY/NJ Machine Automation Controller by using the same
instructions and programming methods.
Come possiamo aiutarti?
Se hai domande o desideri richiedere un preventivo, contattaci o inviaci una richiesta.
Contattaci i4L
ATTENZIONE! Non utilizzare questo modulo di contatto per i prodotti medicali Omron, per i quali vi invitiamo a consultare il sito Corman alla sezione Assistenza Tecnica.

Grazie per averci sottoposto la tua richiesta. Ti risponderemo non appena possibile.
Purtroppo abbiamo problemi tecnici. Il tuo modulo non è stato ricevuto correttamente. Ci scusiamo per l'inconveniete e ti chiediamo per favore di riprovare più tardi.
DownloadPreventivo per i4L
Tramite questo modulo può richiedere un'offerta relativa al prodotto prescelto. Completi, per favore, i campi contrassegnati con *. I suoi dati personali verranno trattati secondo le normative vigenti. Le ricordo che il minimo importo fatturabile è di 400 € a cui bisogna aggiungere 25 € di spese amministrative.
Grazie per averci richiesto un'offerta. Vi risponderemo non appena possibile.
Purtroppo abbiamo problemi tecnici. Il tuo modulo non è stato ricevuto correttamente. Ci scusiamo per l'inconveniete e ti chiediamo per favore di riprovare più tardi.
DownloadModelli
i4-350L

- Raggio di azione: 350 mm
- Portata max: 5 kg
- Corsa Z: 180 mm
- Classe IP: standard IP20
- Tempo ciclo nominale Adept con 2 kg: 0,65 s o meno
- Tempo ciclo massimo Adept con 2 kg: 0,65 s o meno
- Ripetibilità (mm): XY +/-0,01 / Z +/-0,01 / Theta +/-0,01 gradi
i4-450L

- Raggio di azione: 450 mm
- Portata max: 5 kg
- Corsa Z: 180 mm
- Classe IP: standard IP20
- Tempo ciclo nominale Adept con 2 kg: 0,65 s o meno
- Tempo ciclo massimo Adept con 2 kg: 0,65 s o meno
- Ripetibilità (mm): XY +/-0,01 / Z +/-0,01 / Theta +/-0,01 gradi
i4-550L

- Raggio di azione: 550 mm
- Portata max: 5 kg
- Corsa Z: 180 mm, opzione per 350
- Classe IP: standard IP20
- Tempo ciclo nominale Adept con 2 kg: 0,65 s o meno
- Tempo ciclo massimo Adept con 2 kg: 0,65 s o meno
- Ripetibilità (mm): XY +/-0,01 / Z +/-0,01 / Theta +/-0,01 gradi
Caratteristiche
Integrazione semplice.
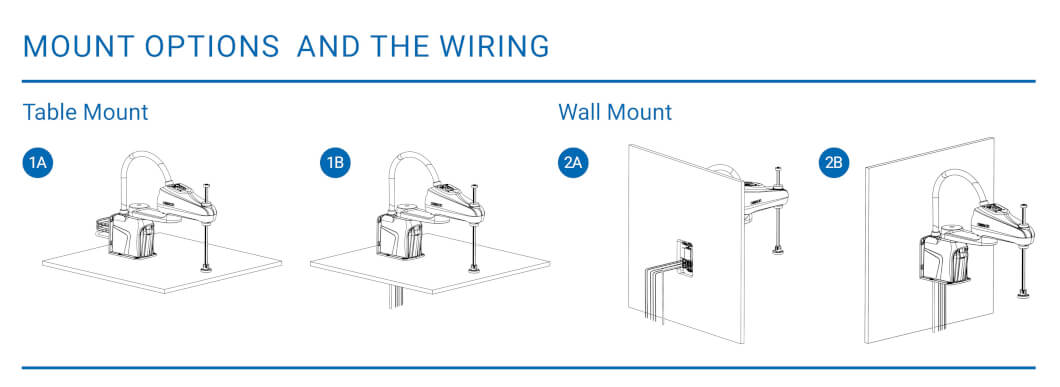
L'i4L offre una semplice integrazione con design compatto e ingombro ridotto. L'installazione è semplice poiché il robot può essere montato su una superficie orizzontale (montaggio su tavolo) o verticale (montaggio a parete) senza la necessità di adattatori o staffe aggiuntivi. Le connessioni cablate possono essere disposte in modo da attraversare la superficie di montaggio o rimanere parallele ad essa.

Ottimizza la linea con il massimo tempo di attività.
L'i4L consente di ottimizzare i tempi di attività tramite allarmi di manutenzione interattivi e un illuminatore dome RGB. Il robot i4L diagnostica i problemi più rapidamente grazie all'esclusivo illuminatore dome a LED multicolore ad alta visibilità che consente la manutenzione predittiva e fornisce una pratica indicazione dello stato del robot.
La soluzione di robot industriali con le migliori prestazioni per la tua fabbrica
L'i4L offre inerzia e ripetibilità elevate per un robot SCARA per impieghi leggeri, fornendo prestazioni elevate per la tua applicazione. Ottimizza i tempi di lavoro con un'integrazione e una sincronizzazione più semplici, implementando diversi robot e riducendo la complessità di configurazione e i tempi di programmazione.
Connettività industriale
L'i4L può collegarsi facilmente a reti e PLC grazie ai protocolli industriali integrati.
Più opzioni che mai.
Abbiamo portato il robot SCARA standard al livello successivo ricorrendo a diverse applicazioni per una maggiore produttività sul luogo di lavoro. La velocità dell'i4L consente di accelerare la movimentazione dei materiali e contribuisce a ridurre i costi dei materiali, liberando al contempo le risorse umane per impiegarle su altre attività in grado di massimizzare la produttività.
Unità di controllo
Comando robot

Pulsantiera T20
La pulsantiera T20 è un dispositivo ergonomico e robusto che consente agli utenti di impartire manualmente le istruzioni al sistema robotico. L'ergonomicità del dispositivo assicura un utilizzo comodo e senza affaticamento. La pulsantiera T20 è compatibile con tutti i robot azionati dallo SmartController EX.
Dettagli del prodotto - Supporto
- Attivazione/disattivazione dell'alimentazione
- Jog del robot in diverse modalità (joint, world, tool, frame)
- Pulsante E-Stop ed enabling device a 3 posizioni
- Interfaccia utente a colori ad alta risoluzione
- Posizioni memorizzate tramite teaching
- Visualizzazione della posizione del robot, dell'I/O digitale e dello stato di sistema
- Visualizzazione dell'indirizzo IP del controllore
Il prodotto include
Pulsantiera T20 con cavo da 10 m incorporato, cavo adattatore da 3 m con connettore paratia e documentazioneVisione e ispezione assistite

Computer industriale all'avanguardia ottimizzato per applicazioni robotiche di visione assistita: IPC Application Controller
- Sistema di visione integrato con SSD da 128 GB, ottimizzato per elaborare immagini ad alta risoluzione e frequenza elevata di fotogrammi, con ACE 4.X
- Design termico unico e semplificato per l'ottimizzazione dei tempi di uptime
- Porte GigE PoE e USB 3.0 per una maggiore connettività e la rapida trasmissione dei dati
- Supporto per 8 telecamere in simultanea
- Compatibile con la serie di gruppi di continuità (UPS) S8BA di OMRON
- Design compatto per ridurre al minimo lo spazio nel quadro, consentendo 2 orientamenti di montaggio
Video

-

OMRON’S i4L SCARA Robot Series
Introducing OMRON’s next generation I4-L Scara Robot Series The i4L is a compact SCARA robot which offers strong performance at the lowest cost of ownership. Simple integration with compact design, easy wall or table mounting and unique Ethernet or EtherCAT connectivity in the base. Maximize uptime by means of interactive maintenance alarms and an RGB dome light. Gain significantly greater performance for the lowest total cost of ownership. The i4L’s speed, inertia, and repeatability offer advance features providing the best performance necessary for your application. Learn more here:
02:33
OMRON’S i4L SCARA Robot Series
Introducing OMRON’s next generation I4-L Scara Robot Series The i4L is a compact SCARA robot which offers strong performance at the lowest cost of ownership. Simple integration with compact design, easy wall or table mounting and unique Ethernet or EtherCAT connectivity in the base. Maximize uptime by means of interactive maintenance alarms and an RGB dome light. Gain significantly greater performance for the lowest total cost of ownership. The i4L’s speed, inertia, and repeatability offer advance features providing the best performance necessary for your application. Learn more here:
-

Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.
01:21
Omron PackXpert: complete packaging solution
A complete single source integrated solution: robot, vision, motion, design & control. Manage your packaging line on your own with an intuitive, graphical interface. PackXpert Solution brings together our complete line of robotic automation products into a single, fully integrated packaging system. From design to implementation to product changeovers, with PackXpert, you’ll save time, lower costs and reduce the complexity of your packaging line.Prodotti
-

Esclusivo pacchetto software OMRON basato su PC per l'automazione della produzione
-

Sfrutta al meglio la produzione con un carico più elevato e tempi ciclo più rapidi
Area di download





_getting_started_guide_en.jpg)









_users_manual_en.jpg)



