CK3M e CK5M
Controllore Multiasse Programmabile
Controllore multiasse con un tempo di ciclo servo più rapido di 50 µs/5 assi per la massima lavorazione di precisione
- Assi Analogici per una precisione nanometrica
- Controllo sincrono a velocità ultra elevata (50µs/5 assi)
- Algoritmi personalizzati di regolazione dei servo
- Flessibilità nell’uso di encoder e attuatori multifornitore
- Flessibilità nella programmazione su G-code, ANSI C o linguaggio di programmazione propietario
- EtherCAT per una configurazione flessibile
- Design modulare e montaggio su guida DIN
Caratteristiche ed info per ordinare
| Prodotto | Type of module | CPU clock frequency | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Descrizione | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
CK3M Motion Control CPU | 1.0 GHz | 0 | 4 | 0 | 0 | 0 | CPU CK3M, RAM 1 GB, flash 1 GB, EtherCAT assente. È possibile collegare il massimo due unità di interfaccia assiali. È possibile collegare moduli di espansione. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 4 | 4 | 0 | 0 | 0 | CPU CK3M, RAM 1 GB, flash 1 GB, 4 assi EtherCAT. È possibile collegare il massimo due unità di interfaccia assiali. È possibile collegare moduli di espansione. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 8 | 4 | 0 | 0 | 0 | CPU CK3M, 1 GB RAM, 1 GB Flash, 8 assi EtherCAT. È possibile collegare fino a un'unità di interfaccia a due assi. Le unità di espansione possono essere collegate. |
|
|||
|
|
Analog I/O | 4 | CK3W Analog IN, 4 punti, +/- 10 V, 16 bit (fondo scala) |
|
||||||||
|
|
Analog I/O | 8 | CK3W Analog IN, 8 punti, +/- 10 V, 16 bit (fondo scala) |
|
||||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | Unità di interfaccia a 4 assi CK3W, encoder digitale, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | Unità di interfaccia a 4 assi CK3W, encoder digitale, DirectPWM, PNP |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | Unità di interfaccia a 4 assi CK3W, uscita analogica (PWM filtrato), impulso + direzione o fasi differenziali, encoder a impulsi / encoder seriale, tipo di uscita NPN |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | Unità di interfaccia a 4 assi CK3W, uscita DA (PWM con filtro), impulso + direzione o differenza di fase, encoder a impulso/encoder seriale, tipo di uscita PNP |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | CK3W Modulo di interfaccia a 4 assi, uscita DA (True DAC), impulso + direzione o differenza di fase, encoder a impulsi / encoder seriale, tipo di uscita NPN |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | Unità di interfaccia assiale CK3W. Uscita DA (DAC reale), impulso + direzione o differenza di fase, encoder a impulso/encoder seriale, tipo di uscita PNP |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | Unità di interfaccia a 4 assi CK3W, encoder sinusoidale, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | Unità di interfaccia a 4 assi CK3W, encoder sinusoidale, DirectPWM, PNP |
|
||||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Unità di ingresso encoder per CK3M, encoder seriale a 4 canali, BiSS-C, Endat2.2 e encoder incorporato per motore R88M-1L/1M |
|
|||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Unità di interfaccia laser per CK3M, protocollo XY2-100, uscita laser PWM |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Unità di interfaccia laser per CK3M, protocollo XY2-100, uscita laser PWM e uscita TCR |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Unità di interfaccia laser per CK3M, protocollo SL2-100, uscita laser PWM |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Unità di interfaccia laser per CK3M, protocollo SL2-100, uscita laser PWM e uscita TCR |
|
||||||
|
|
Digital I/O | NPN | 16 | 16 | INGRESSO/USCITA DIGITALE CK3W: 16 IN / 16 OUT, NPN |
|
||||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W I/O digitale, IN/OUT: 16/16, PNP |
|
||||||
|
|
CK5M Motion Control CPU | 1.6 GHz | 16 | 8 | 0 | 0 | 0 | CPU CK5M Quad Core 1040, 2 GB di RAM, 4 GB di memoria Flash, 16 assi EtherCAT È possibile collegare fino a 8 unità di interfaccia assi tramite unità di espansione, max 32 assi locali |
|
|||
|
|
CK5M Motion Control CPU | 1.6 GHz | 32 | 8 | 0 | 0 | 0 | CPU CK5M Quad Core 1040, 2 GB di RAM, 4 GB di memoria Flash, 32 assi EtherCAT È possibile collegare fino a 8 unità di interfaccia assi tramite unità di espansione, max 32 assi locali |
|
Come possiamo aiutarti?
Se hai domande o desideri richiedere un preventivo, contattaci o inviaci una richiesta.
Contattaci CK3M e CK5M
ATTENZIONE! Non utilizzare questo modulo di contatto per i prodotti medicali Omron, per i quali vi invitiamo a consultare il sito Corman alla sezione Assistenza Tecnica.

Grazie per averci sottoposto la tua richiesta. Ti risponderemo non appena possibile.
Purtroppo abbiamo problemi tecnici. Il tuo modulo non è stato ricevuto correttamente. Ci scusiamo per l'inconveniete e ti chiediamo per favore di riprovare più tardi.
DownloadPreventivo per CK3M e CK5M
Tramite questo modulo può richiedere un'offerta relativa al prodotto prescelto. Completi, per favore, i campi contrassegnati con *. I suoi dati personali verranno trattati secondo le normative vigenti. Le ricordo che il minimo importo fatturabile è di 400 € a cui bisogna aggiungere 25 € di spese amministrative.
Grazie per averci richiesto un'offerta. Vi risponderemo non appena possibile.
Purtroppo abbiamo problemi tecnici. Il tuo modulo non è stato ricevuto correttamente. Ci scusiamo per l'inconveniete e ti chiediamo per favore di riprovare più tardi.
DownloadCaratteristiche

Design modulare
Il design modulare permette di combinare liberamente il CK3M anche con due unità di interfaccia assiali per una vasta gamma di applicazioni.
Power PMAC IDE (Integrated Development Environment)
- Basato su Microsoft® Visual Studio®
- ANSI C o linguaggio di programmazione propietario
- Facilità di regolazione
- Semplice impostazione
- Troubleshooting
- Debugger
Cinematiche complesse
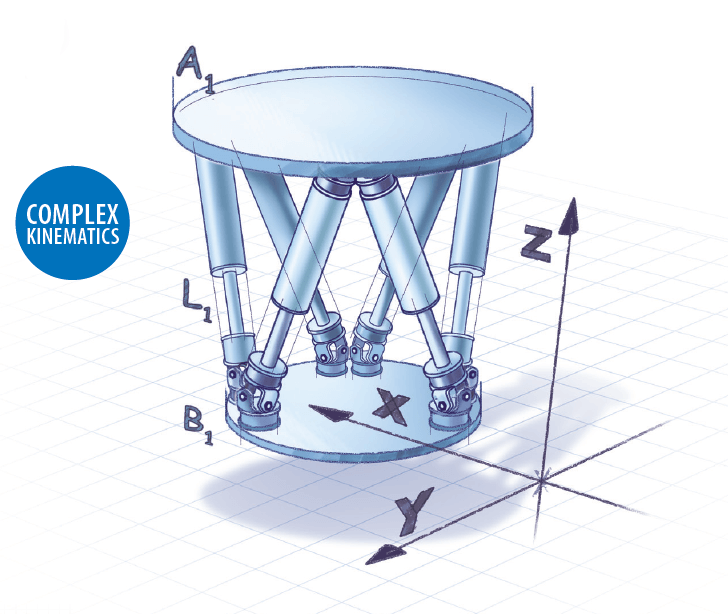
Grazie alla gestione delle matrici e alla conversione spaziale, è possibile controllare meccaniche complesse. Applicazioni speciali, come ad esempio il posizionamento degli specchi del telescopio Hexapod, possono essere facilmente implementate tramite la funzionalità di gestione cinematica.
Utilizzo di funzioni per una lavorazione precisa
G-Code
Interprete G-code standard RS-274. Routine secondarie con diritto di scrittura per l'utente per l'implementazione personalizzata dei codici G, M, T e D. Flessibilità di adattamento della sintassi e di lavorazione in combinazione con qualsiasi software CAD/CAM.
Compensazione 2D/3D del raggio utensile
Compensazione del diametro e della forma dell'utensile, abbinando il punto di taglio esattamente come specificato nel G-code.
Processore veloce + ampio buffer del programma
Il processore veloce è in grado di gestire oltre 10.000 blocchi al secondo e fino a 1 Gb di programmi.
Funzione Block Retrace per l'inversione del percorso
Per rimuovere l'utensile dall'area di taglio, è possibile invertire il percorso.
Lookahead avanzato
Le istruzioni del buffer vengono analizzate in anticipo e i movimenti sono sottoposti a blending e ottimizzati quanto a velocità e accelerazione per migliorare le prestazioni.
Gestione dello strumento tangente
Gli utensili con una direzione di taglio richiedono il posizionamento del percorso tangente.
Software
Power PMAC IDE
Questo software è utilizzato per configurare, creare programmi per l'utente e per il debugging dei programmi per i controller a più assi programmabili NY51-A e CK3E.
Prodotti
-

Controllore Multiasse Programmabile CK3E
-

Prestazioni e praticità per il controllo macchina
-

Servoazionamento per impieghi generali Sysmac
Area di download









_getting_started_guide_en.jpg)